

APPRENDRE, ENRICHIR ET PARTAGER
Nous proposons un robot aspirateur simple à construire, tout est en partage plans, pièce 3D, fichiers STL, schémas électroniques, ce robot qui pourra au grè des uns et des autres, évoluer dans son aspect, sa fonctionnalité à vous de jouer en fonction de vos aptitudes, vos goûts...
Ce site évolue en permanence, il vous faudra venir régulièrement pour avoir informations mises à jour régulièrement
caractéristiques :
-construit avec des pièces réalisées sur imprimantes 3d (ender 3)
-matériel (roues, brosses, moteur roue et brosse...) acheté sur aliexpress.
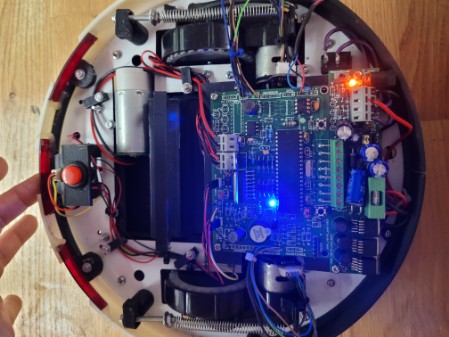
-robot de taille 28cm de diamétre
-hauteur 9cm
-tension alimentation 16v (par chargeur sans enlever les batterie ou chaque batterie individuellement) (4 batteries 18650)
-tension de fonctionnement 12v par batterie(4h d'autonomie)
-pcb, pièces, disponibles sur ce site
-surface de nettoyage à définir en fonction du programme
La petite vidéo à droite vous montre un exemple de programme simple......


















Si vous cherchez à réaliser un robot moins cher que le marché, c’est peine perdue vous ne pouvez concurrencer la production de masse à faible coût de main d’œuvre des pays asiatiques. En revanche vous pourrez apprendre, progresser, partager, expliquer.... dans tous les domaines techniques tels que l'électronique générale, microcontrôleur Microchip PIC, la communication I2C, SPI ,PWM, ANA….. conception mécanique, freecad, imprimante 3d, soudure PCB et le montage mécanique…
Nous fournissons en partage tout le nécessaire pour réaliser le robot, y compris les plans, les programmes, les fichiers STL, les listes de matériel, les nomenclatures et des conseils, sauf bien sûr le matériel lui-même, qu'il faudra acheter (outillage, fer à souder, imprimante 3D, matière première, etc.). Nous indiquerons les besoins au fur et à mesure.
Pour appréhender clairement tous les aspects de la conception à la réalisation d'un robot aspirateur évolutif, nous mettons également en parallèle des vidéos se référant aux différents points du robot, avec des explications théoriques et pratiques (cours sur les PIC, utilisation pratique d'une machine 3D, etc.).
Chacun de vous pourra exprimer pleinement son talent, tous les domaines sont perfectibles (inutile de m’appeler pour me dire que l’on pourrait faire mieux; faites et envoyez moi vos travaux...) mais rappelons nous que notre objectif est de mettre en partage nos connaissances donc il est indispensable que chaque modification soit pleinement commentée : ses avantages, inconvénients, notes de calculs, plans, schéma, grafcet, algorithme, programmes, etc.
J’espère que vous contribuerez à l’amélioration du robot par vos envois, nous les testerons puis ils seront mis à disposition.
L'évolution de ce site va dépendre de l'intérêt qu'on lui porte, si il n'en a pas il mourra .....
Je suis aussi preneur de toutes les bonnes pratiques avec tous ces logiciels….
Pour info : Je suis comme tout le monde mon temps est compté d’ailleurs c’est la seule chose qu’on ne peut acheter donc je ne vous aiderez pas pour vos projets, pour vos devoirs, pour vos développements perso……, Je peux approfondir un sujet abordé dans une vidéo, mais en aucun cas je ne déborderai.
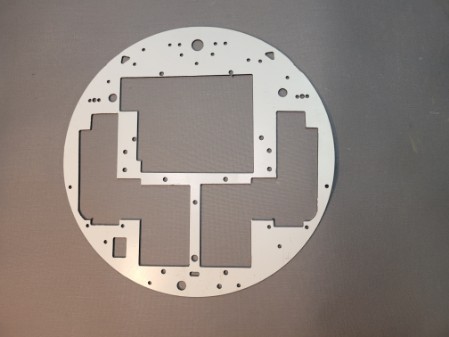
La pièce maîtresse est réalisée en « dibond » de 3 mm (on trouve des plaques chez Leroy Merlin ou Castorama, une feuille de plastique entre deux feuilles d’aluminium). Cependant, elle peut être fabriquée en aluminium, plastique, ou d'autres matériaux, tant qu'une certaine rigidité est assurée. Elle est usinée sur une CNC 6040, mais il est également possible de la réaliser à la main avec un peu d'application. Tous les plans nécessaires sont disponibles sur ce site. (Nous proposons également la pièce finie dans notre boutique)
Matériel et logiciels utiles pour réaliser le robot RAPE
(Robot Aspirateur Programmable Evolutif )
LOGICIELS
Bureautique Microsoft :
· Excel· Viso· Vbscript (gratuit).
Liste des logiciels (tous gratuits) :
Dessin électronique :
· DIPtrace. (gratuit jusqu’à 1000 pastilles).
Programmation et mise au point du PIC :
· Programmation PIC : MPLABX-V6.05 (programmation en C).· Transfert programme par MPLAB X IPE.· Lecteur des infos du pic sur PC par une rs232 par Tera TERM (lecture Bluetooth possible)
Dessin et fichiers stl pour imprimante 3d :
· FREECAD 0.20· CURA ou creality slicer 4.08.
Fichiers CNC
· CAMBAM
Matériel :
Informatique :
· Ordinateur.· Programmation du pic avec PICkit3 ou 4.· Boitier de com RS232.
électronique
· Fer à souder.· Etain· Petit outillage (pinces…)· Multimètre
Réalisation des pièces plastiques
Machine 3d
(réalisés sur une ender3) mais les autres fonctionnent
Impératif : il faut que le plateau soit en 220 * 220 mm au minimum sinon il faudra faire des découpes de pèces.
Points étudiés sous forme de vidéo pour réaliser ce Robot :
Les bases
· Tension, intensité, puissance (taille de la filerie)· Utilisation d’un multimètre, mesures· Résistances· Condensateur· Self· Diodes· Pont diviseur de tension· régulateur
Pour aller plus loin
· Mosfet IRF9530· Transistor· Ampli op LM358N· Optocoupleur PC817· L298N· Max232 et la communication· Mémoires 23K256
La programmation du pic
· Les pics et en particulier le 18f47k40 (lecture du datasheet)· La programmation en C· Les grafcets
Usinage CNC
Cambam sur la plaque principal
Vous pouvez nous joindre
en envoyant un mail à : rob.aspi.rape@gmail.com